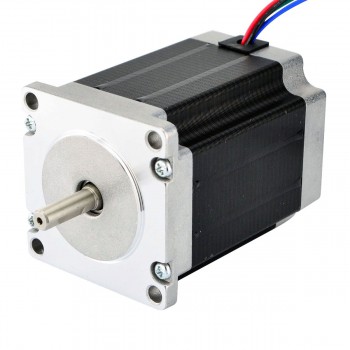
1.Structure of bipolar stepper motor
The bipolar stepper motor contains two independent coils inside, each coil has two wires, a total of four wires. This design allows the motor to reverse by changing the direction of the current in the coil during operation, so that the motor can be reversed without changing the motor structure. In addition, the stator of the bipolar stepper motor usually contains 8 teeth, each of which is wound with a two-phase bipolar winding to achieve precise control of the motor.
2.Working process of bipolar stepper motor
1.Current direction change: The working principle of the bipolar stepper motor is to drive the rotor to rotate by changing the direction of the current. Specifically, when the current passes through the coil, a magnetic field is generated, which attracts or repels the magnets in the rotor, causing it to rotate.
2.Phase switching: Bipolar stepper motors usually have two phases, each corresponding to a set of coils. By switching the current direction of these two phases, the rotation of the rotor can be controlled. For example, when current passes through the A-phase coil, the rotor will rotate in one direction; when the current switches to the B-phase coil, the rotor will rotate in the other direction.
3.Step angle: The step angle of a bipolar stepper motor is usually 90 degrees, which means that each change in the direction of the current will cause the rotor to rotate 90 degrees. Through multiple such steps, the rotor can complete a full circle of rotation.
3.Control mode of bipolar stepper motor
1.Single-phase stepping: In this mode, the A-phase and B-phase windings are energized in a certain order, so that the stator magnetic field changes accordingly, thereby driving the rotor to rotate. Specifically, when the A-phase winding is energized, the rotor will rotate in one direction; when the B-phase winding is energized, the rotor will rotate in the other direction. By alternating the energization state of the A-phase and B-phase windings, continuous rotation of the rotor can be achieved. Although the single-phase stepping mode is simple and easy to understand, it may not meet the requirements in situations where higher precision control is required due to its large step angle (usually 1.8°).
2.Full-step stepping: In this mode, the motor rotates one step angle for each pulse signal received. For bipolar stepper motors, the step angle is usually 1.8°. Full-step stepping mode is one of the more commonly used control modes in bipolar stepper motors and is suitable for application scenarios that require a stable step angle.
3.Half-step stepping: In this mode, the motor only rotates half of the step angle for each pulse signal. By precisely controlling the phase current of the motor, a smaller step angle can be achieved, thereby improving the accuracy and smoothness of the motor. Half-step stepping mode is suitable for application scenarios that require high-precision control.
4.Applications of bipolar stepper motors
1.Industrial automation: In the fields of industrial robots, automated production lines, and transport vehicles, bipolar stepper motors are used to precisely control the movement speed and direction of the robot to improve production efficiency and accuracy.
2.CNC machine tools: In CNC machine tools, bipolar stepper motors are used to control the movement of tools or workbenches, and high-precision processing of workpieces is achieved by controlling the speed and direction of the motor.
3.Printers: In inkjet printers and laser printers, bipolar stepper motors are used to control the movement of the print head. By precisely controlling the movement of the motor, high-quality text and image printing can be achieved.
4.Medical equipment: In medical imaging equipment such as X-ray machines, CT scanners, etc., bipolar stepper motors are used to drive the movement of the scanning frame. By precisely controlling the movement of the motor, fast and accurate imaging of patients can be achieved.
5.Aerospace: In aerospace equipment such as satellite attitude control and rocket propulsion systems, bipolar stepper motors are used to control the movement of actuators to meet the requirements of high precision and high stability.
6.Entertainment and gaming equipment: In equipment such as laser engravers, 3D printers, and game controllers, bipolar stepper motors are used to control the movement of actuators to ensure precise control and high-quality output of the equipment.
7.Education and research: In laboratory instruments and teaching equipment, bipolar stepper motors are used to control the movement of experimental platforms. Their low cost and high precision make them ideal teaching tools.
Posted
Feb 21 2025, 01:20 AM
by
Amaris07